Projects
Compliant Egg Gripper
We developed a hand-held, compliant, lasercut acrylic gripper that can
firmly pick up raw eggs and is impervious to disturbances such as shaking
and impacts. The gripper is designed to be used by a human operator
with average grip strength and also ensures that the acrylic does not
plastically deform after repeated use.
This project was done for the MIT Compliant Mechanisms course with
fellow students Yuxiang Ma and Stephan Stansfield.
Passive Sit-to-Stand Assistive Device
A passive sit-to-stand assistive device Yuxiang Ma, Stephan Stansfield, and I designed and built for the final project of MIT's Compliant Mechanisms course. The device is a cam mechanism that stores energy when the user sits down and assists the user as they stand back up.
Teaching a Robot How to Throw with RL
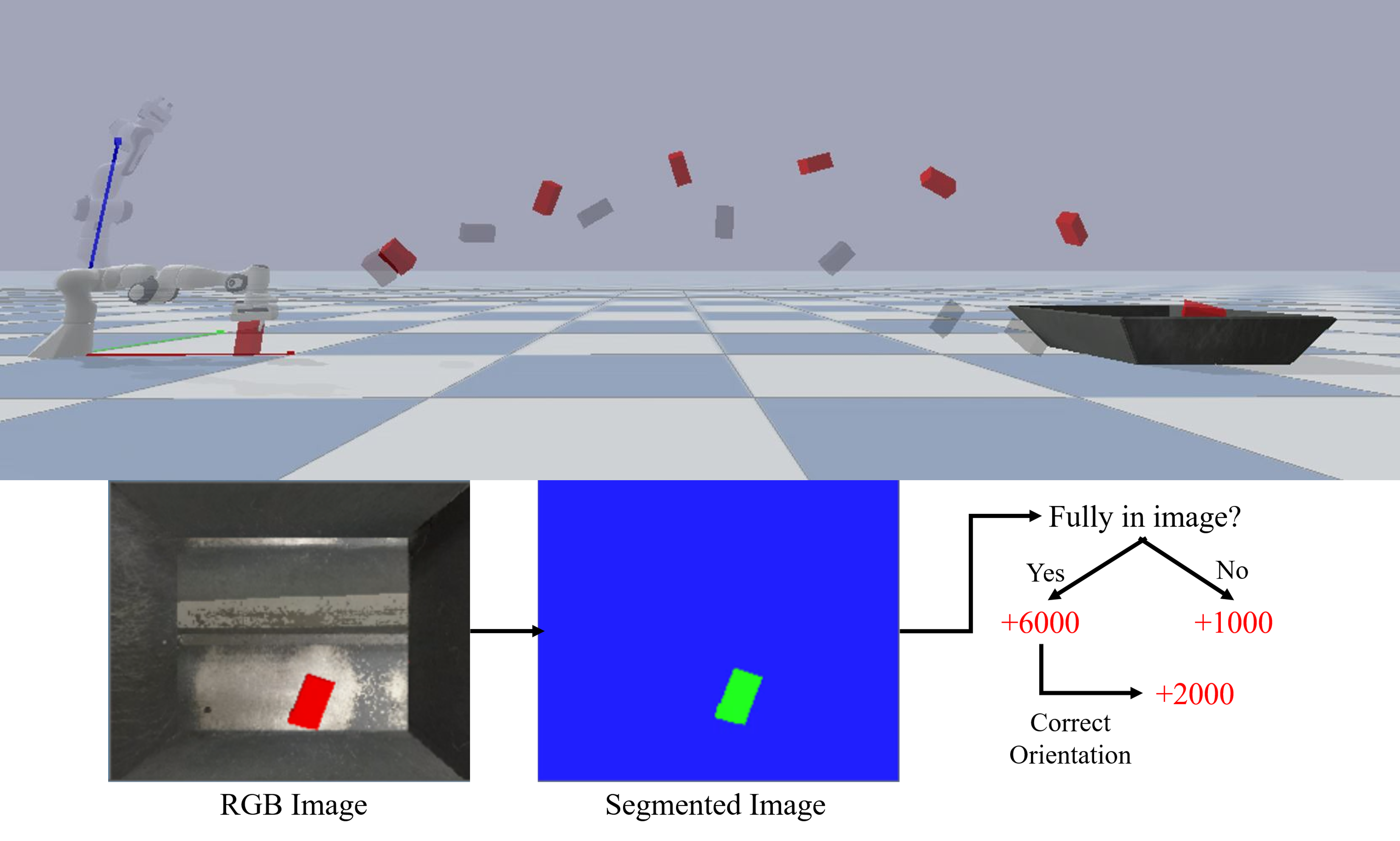
This project, which was done for MIT's Robotic Manipulation class, was a joint effort by Megha Tippur and me to teach a robot how to throw a cylinder into a bin. We used different RL policies, reward functions, and action spaces to see how they affected our robot's throwing performance. All experiments were done in the PyBullet simulator.
Strandbeest Simulator
Inspired by Theo Jansen's Strandbeests and an online simulator
showing that the motion of the Strandbeest linkage approximates
a smooth walking gait, I created a 2D simulator in Python that
allows users to modify the linkage dimensions and see how they
affect the walking gait.
This project was done for the Caltech Intro to Robotics course.
Link to the code can be found
here.
Bug 2 Algorithm Deployment in ROS Gazebo Maze
For the second term of Caltech's Intro to Robotics course, I implemented the Bug 2 algorithm in Python and deployed it in the ROS Gazebo Maze simulator. The robot was successfully able to navigate to the designated waypoint I gave it. Link to the code can be found here.
Simple Truss Stability Analyzer GUI
In my first year at MIT, I took Gilbert Strang's math class. One of the
topics we learned was about truss stability calculations. For the final project,
I decided to create a simple GUI where users can draw a truss structure, complete
with nodes, supports, and links, and the program will calculate whether the truss
is stable or not.
Link to the code can be found
here.
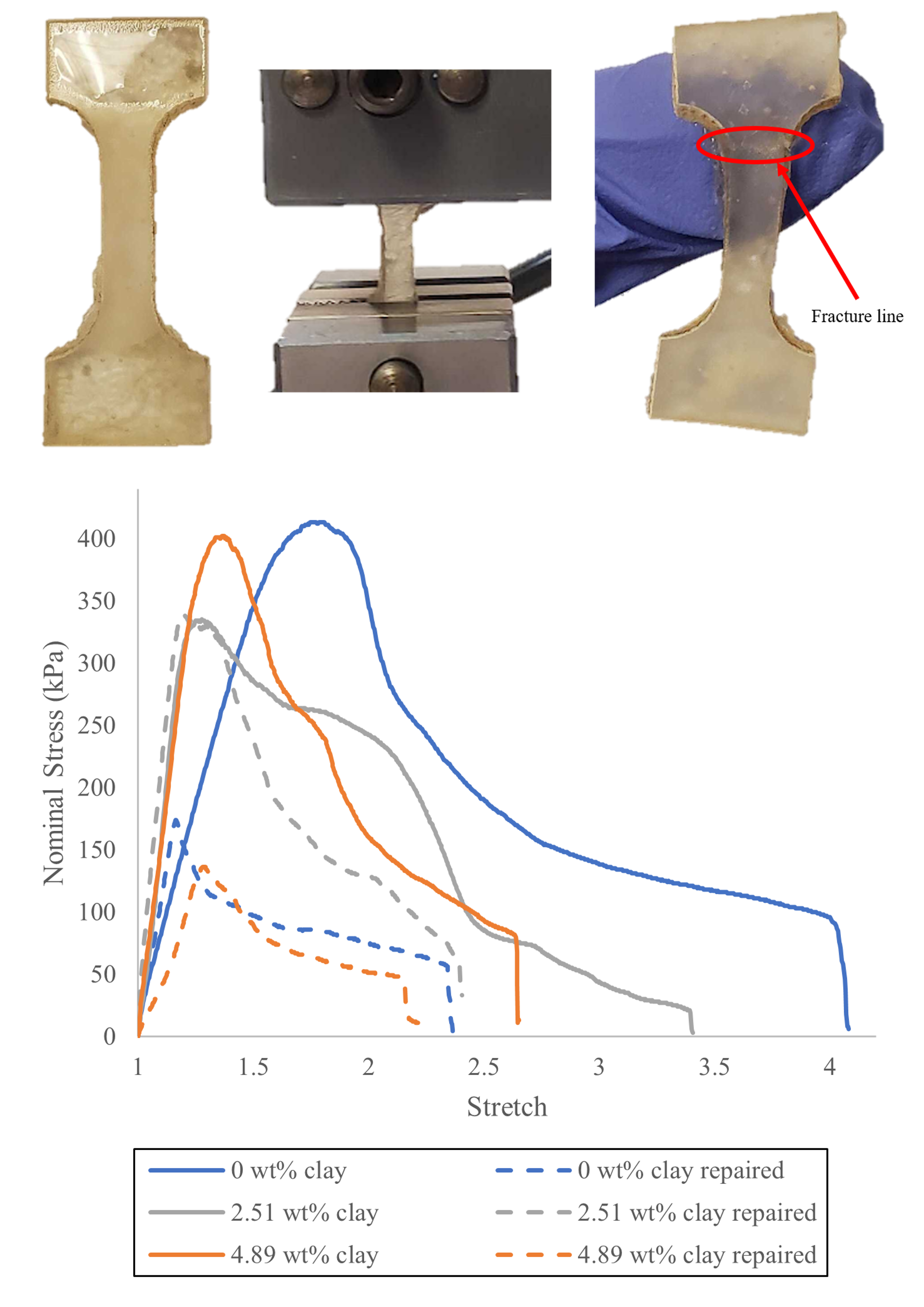
Strengthening Self-Healing Hydrogels
As part of MIT's Soft Materials class, I worked with a group of students to experiment with strenghtening self-healing hydrogels with clay nanoparticles. We found that adding clay nanoparticles to the hydrogel decreased the toughness, strength, and elasticity of the hydrogels we synthesized, but it helped decrease the relative change in maximum stretchability after self-healing.